![]()
Design
Robust control algorithms design.
![]()
Application
Systems optimized for several applications.
![]()
Objectives
![]()
Implementation
Control algorithms implementation.
RPAS
RPAS oriented research and development.
![]()
![]()
Validation
System validation against disturbances.
![]()
Training
Training for researchers.






Pictures and videos
* Click "Click HERE to play" under each video to play them properly.
-

Agressive manoeuvres - Ricardo Sanz at Hangzhou (China)
Click HERE to play -
Control with input/output delays based on UDE
Click HERE to play -

UDE + predictor
Click HERE to play -

Automations Conference 2014
Click HERE to play -

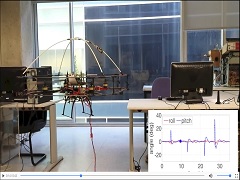
Altitude control using UDE
Click HERE to play -
Kalman Filter demo - ICUAS '14
Click HERE to play -
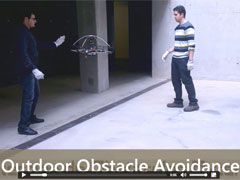
Outdoor obstacles 2013
Click HERE to play -
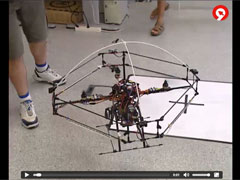
Journalist report, year 2012-13 (Canal 9)
Click HERE to play -
Carrying payload - 2012
Click HERE to play -
First flights Compiegne 2002
Click HERE to play -
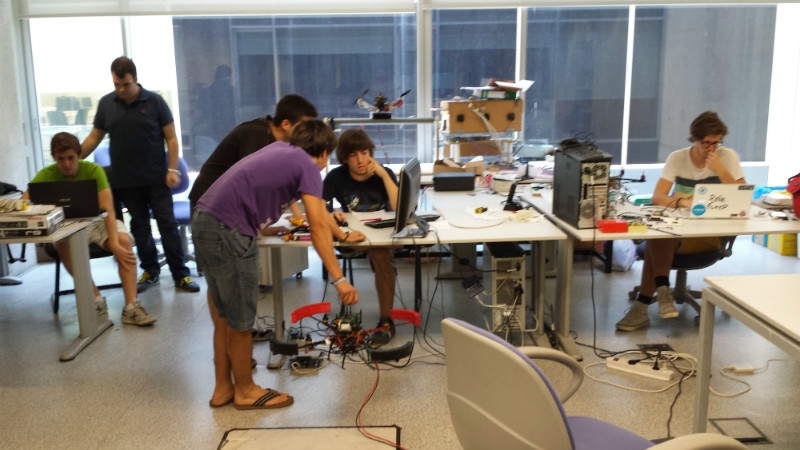
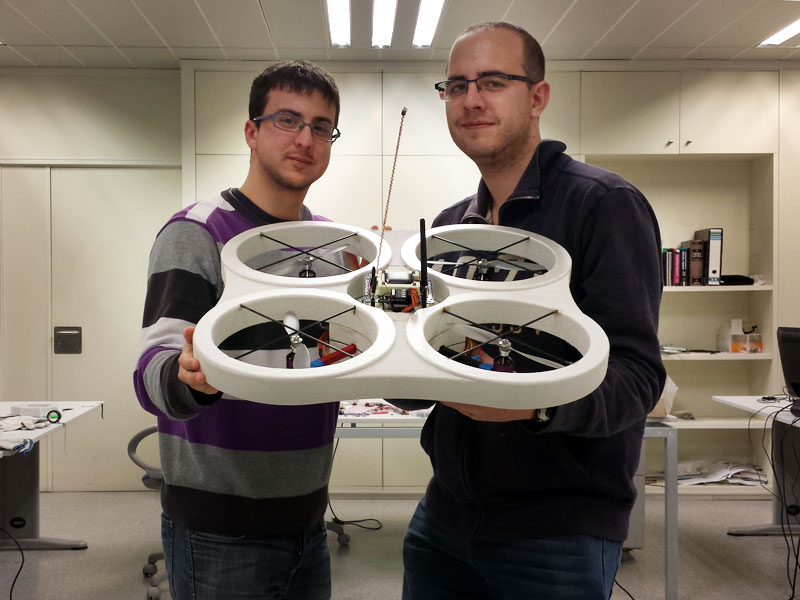
Laboratory team
-
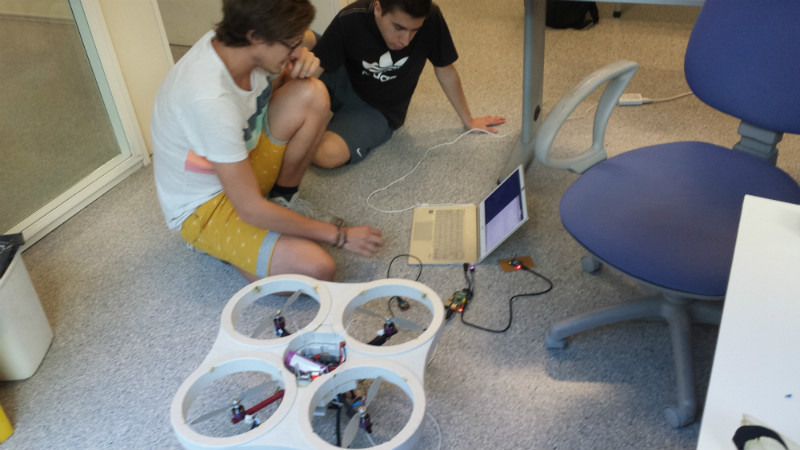
Working at the lab
-

Awards ceremony - Jornadas de Automática 2014
-

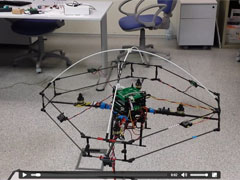
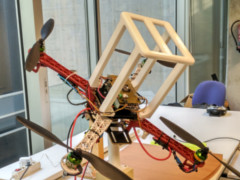
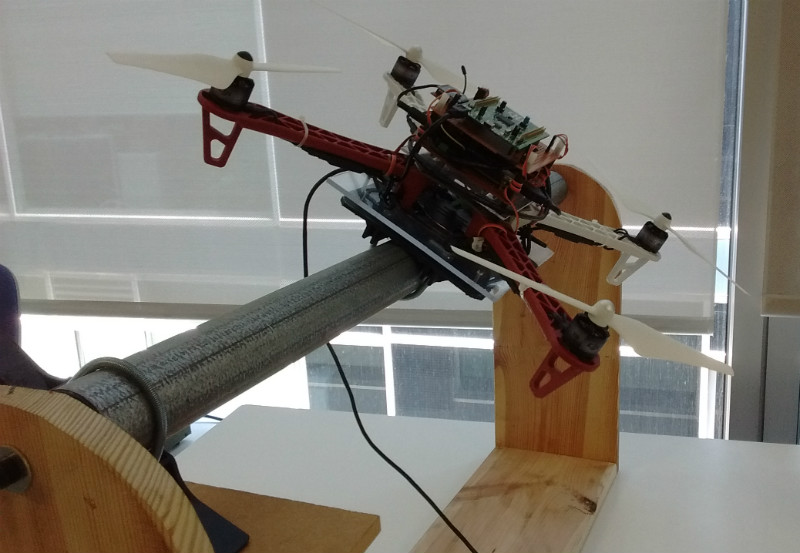
Experimental platform
-

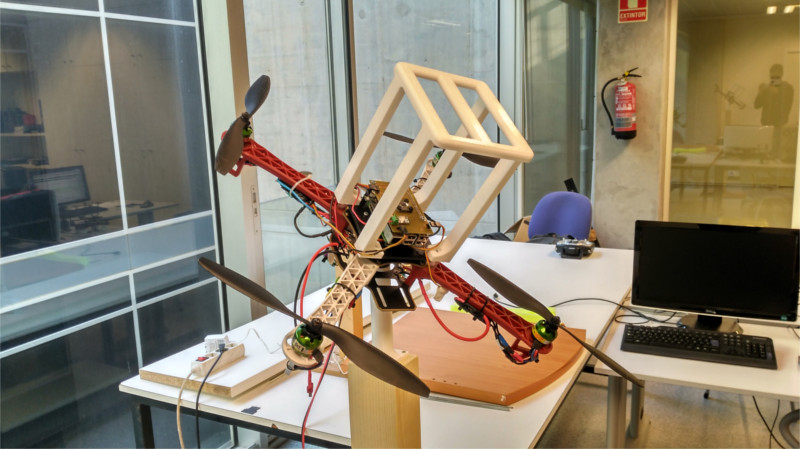
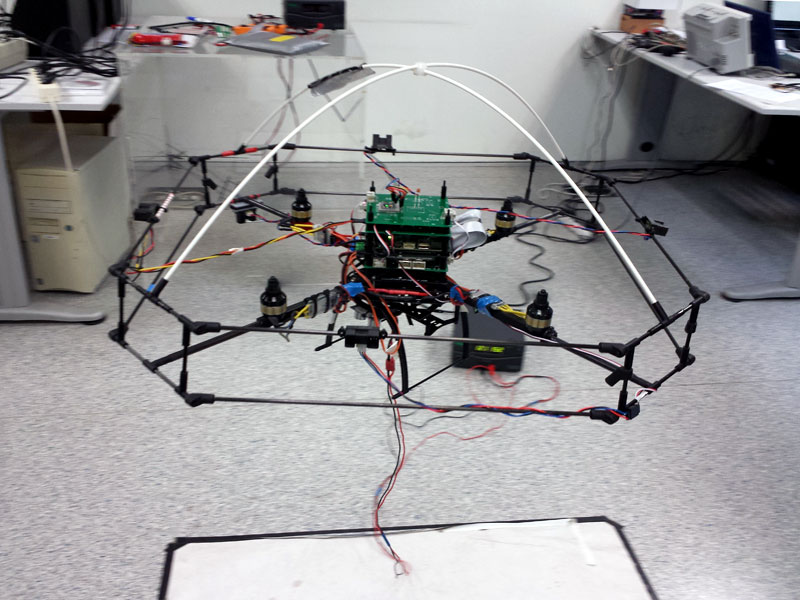
Test-bed platform
-
Automation Conference award 2014
-
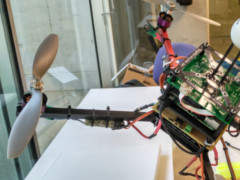
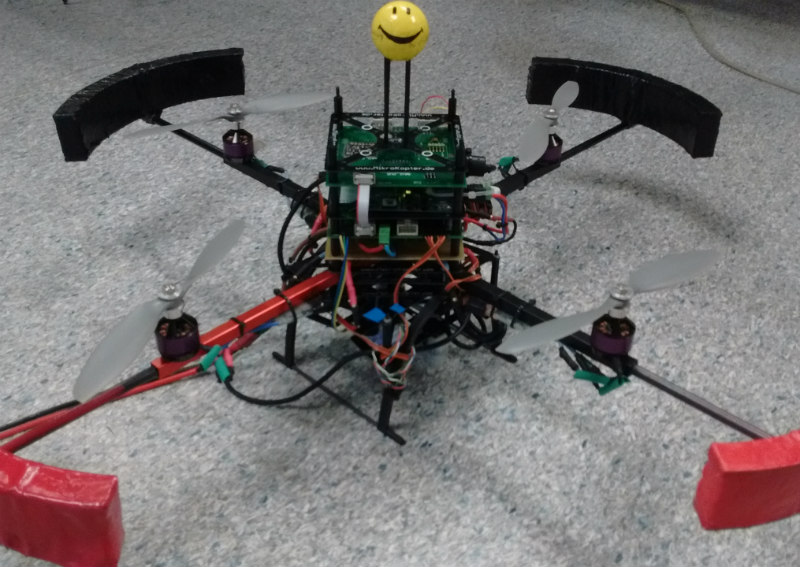
Pivoted quadrotor
-
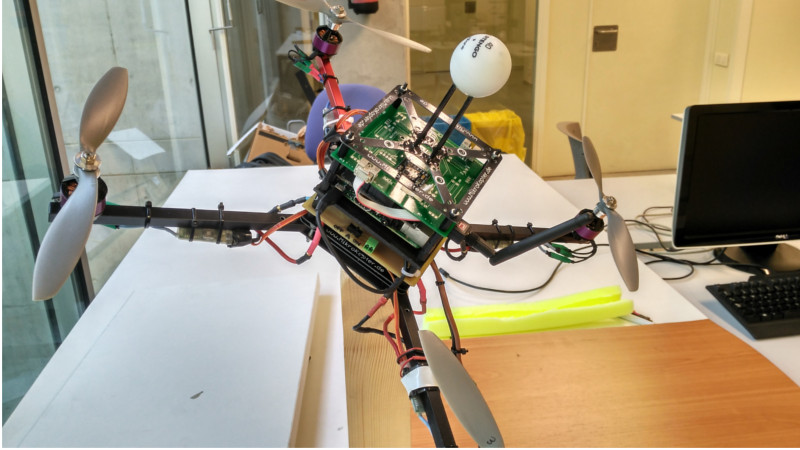
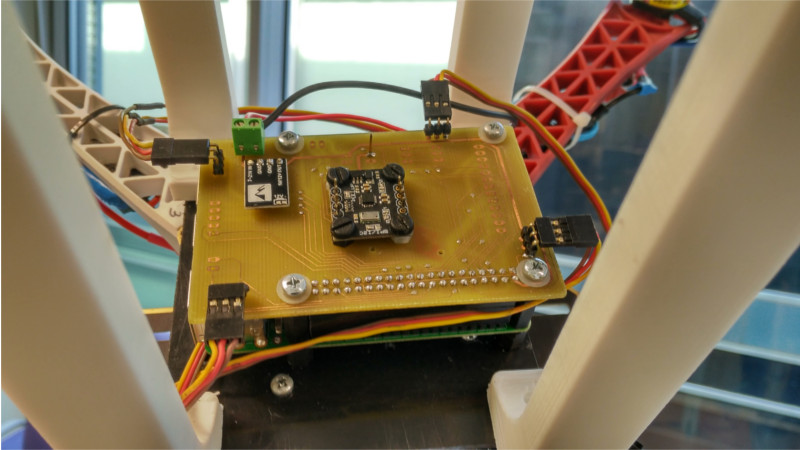
Pivoted quadcopter with PCB
-

Rotatory structure
-
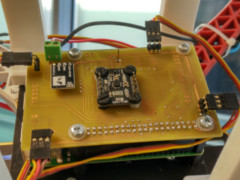
PCB design and manufacturing
-

Final Degree Project: P. Albiol, A. Castillo and D. Verdú
-

OptiTrack camera
-

Flying inside ai2
-

Test-bed platform tests
-

Laboratory flight
-
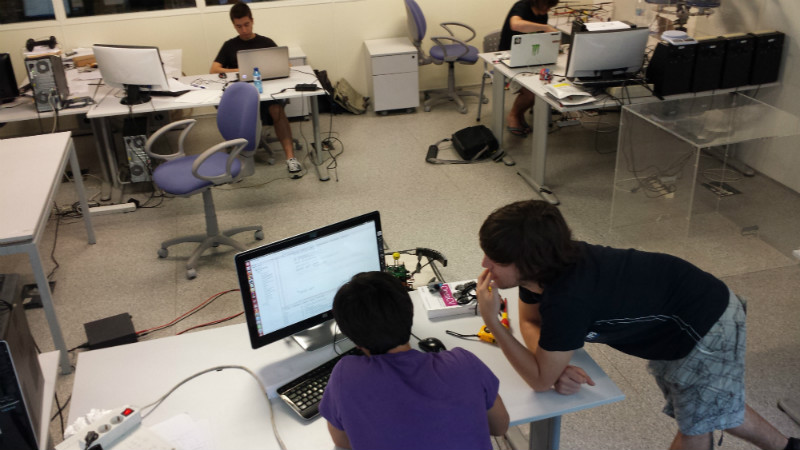
Testing control algorithms
-

Laboratory
-

Testing our platforms
-
Quadcopter prepared for OptiTrack tests
-

Quadcopter - ai2 outdoor flight
-

Testing new prototypes
-

Indoor autonomous quadcopter flight
-

Protection evolution for indoor flight
-

Ai2 surroundings
-

Flight with obstacle avoidance
-

Aerial indoor platforms
-

Prototype ready to fly
-

Test-bed platform with navigation lights
-

Control calibration flight - indoor



















Publications
Location
ai2 institute - Universidad Politécnica de Valencia
Camino de Vera, s/n, 8G building, access D
46022 - Valencia
SPAIN
Camino de Vera, s/n, 8G building, access D
46022 - Valencia
SPAIN
Contact us
963 87 95 50
This email address is being protected from spambots. You need JavaScript enabled to view it.